IMS3/5+ MOBILE MAPPING SYSTEM
3D shape survey device for roads and areas around roads

MMS for Data acquistion to Data extraction

https://www.iwane.com/eng/products/ims3#sigProIda46fc16dbd
IWANE Mobile Mapping System (MMS) is high-efficient, easy-to-use, end-to-end mapping solution that provides tremendous flexibility in collecting, accessing, displaying, and analyzing 360° geo-referenced spherical imagery. Iwane MMS is purely an imagery based MMS based on Iwane’s unique Camera Vector (CV) Technology. Iwane MMS is capable of delivering the results in every environment and surroundings. The MMS does not rely entirely on GPS and the capability to enhance the accuracy even after the data acquisition i.e. supports direct and in-direct geo referencing. The MMS is perfect solution to map urban, rural, mountains, tunnels and highways. This is the only system which can deliver a unique geo content using which one can extract meaningful information like geo-coordinates , make 3D Map , create by-products like 3D computer graphic model, extract road markings, ortho photo of road surface, road markings and other geo digital content for web like advanced 3D street views.

Iwane Dual Mobile Mapping System
Simple, Robust and Flexible
Iwane MMS is a very simple and robust system. User can mount all the MMS equipment’s within an hour on to a shooting vehicle. It is also designed in way that users can easily perform calibrations i.e. the distance between two cameras and between top camera and center head of the GNSS. In order to work in extreme hot condition, we have also designed a metallic cap which protects camera from direct heat and act as insulation. This facilitates the use of MMS even in harsh and hot conditions. The concept is to use minimum sensors and can able to extract more meaningful information from MMS geo-content. The strength of MMS lies in post-processing and the application software’s. MMS mount is also designed so much flexible that it can be mounted on any kind of vehicles like land cruiser, wagon, sedan, pickup truck, and small car and can be up and running in a short span of time.

MMS mount and base station
Components and Acquisition
Iwane MMS Series consist of the following products : :
IMS5+ : Iwane Dual Camera System ( Dual LB5+ camera )
IMS2+ : Iwane Single Camera System ( Single LB5+ camera )
*Please note that the camera manufacturer have stopped manufacturing Ladybug3 camera (LB3) and therefore we cannot sell the system with LB3 from now onwards.
Iwane MMS overcomes the challenges of mapping linear features to a high level of accuracy. Accurate vehicle positions can be obtained using the combination of two technologies: Camera Vector (CV) and GNSS receiver establishes a geospatial position.
The optimal speed for data acquisition is less than 60km/hr. However, it is also possible to collect data at the speed of 100km/h at maximum. Normally the speed can vary but it does not affect in the accuracy of the MMS datasets.
Generally one driver and operator can acquire data but it is also possible for driver alone to acquire data because driver can set all the parameters before the start of data acquisition and just have to click stop at the end of shoot.
The capacity of stream data in shooting by two cameras is around 20-30 GB/km and user can shoot long distances by just changing the HDD’s.

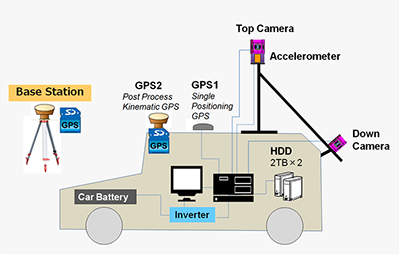
Data Acquistion and other components
Iwane MMS consists of two sets of omni-directional cameras (top & bottom) with 6 CCD ( 5MP X 6) of which total resolution is 8,000 X 4,000 Pixel (Approx. 30 M Pixel /Frame) at maximum. It can capture at 16 frames per second ( fps ) . MMS also have an accelerometer which is used for vertical inclination, GPS & antennas for positioning and coupled GPS & IMU (optional) for high end positioning.
Iwane MMS Architecture
Iwane MMS pipeline from capturing the images to processing and surveying consists of the following steps:
-Data Acquisition: Acquire data on the click of the button.
-Refine Post production: Over 95 % automatic process.
-Geo-referencing: by using Ground Control Points (GCP) / GPS / or both.
-Data Extraction: Extraction of the data and link to the GIS system.
-Data Disseminate: Port data on to server and share on the web.
Post Processing
After the data acquisition, Iwane refine post production tools (95% automatic) are used to extract 3D feature points from identified features in the image sequence and respective camera position & posture is derived by using Iwane post processing software (CV maker). The CV and GPS trajectory is fused together to geo reference all the video/ images in the sequence.
Feature tracking to calculate camera vector
During the post processing , image quality can be enhanced, vibration can be stabilized and the dead hole portion can be complimented with the front or back frame and make a complete all surrounding image.

Omni-directional Image without any deadhole
The size of the processed data is in GB and it can be reduced if the video is output in low resolution. The correlation between the image sequences is very high, therefore the relative accuracy is always higher in Iwane MMS. The relative accuracy is irrespective of the quality of GPS. Iwane MMS supports direct & indirect geo referencing. It means that the positional accuracy can be increased even after data acquisition. This can be done by registering survey control points inside the image and geo reference all the sequence again. MMS can import post processed GPS trajectory (from external high end positioning device used at the time of data acquisition) in CV ImageCreator software and geo reference the image sequence.
Accuracy
We offer cm level of accuracy both in case of positional & relative accuracy. Relative accuracy is 2-5 cm (10-15 m from the center of camera). Positional accuracy depends on type of positioning device and quality of GPS data at the time of data acquisition.Using kinematic post process GPS data, we have achieved less than +/- 15cm cm (X, Y) and +/- 20cm (Z) of the positional accuracy nearby the camera (15-20 meter from the camera). With the use of GPS+ IMU/INS, positional accuracy is achieved less than 10 cm on Highways.
Users can easily check the positional & relative accuracy results by simple visualizing score graph. If required , user can rectify or enhance accuracy by further processing e.g. import control points ( CP's ) and enhance the positional accuracy or jump to specific frame with low accuracy and delete moving feature point on moving objects ( e.g. car ,trucks , etc..)
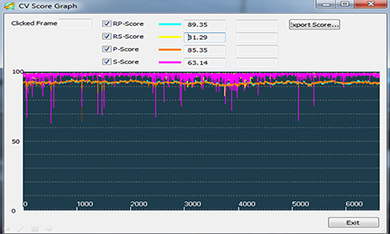
CV score graph depicts accuracy
Use of optional GPS/IMU with MMS
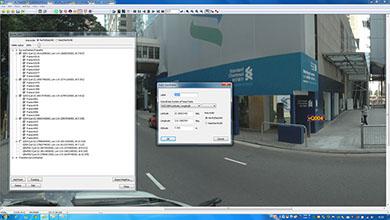
Iwane MMS system is highly flexible to an extent that it can import external high accurate GPS sensor trajectory data and can georeference videos /images using the time stamp. The fourth reference frame or the final position of GPS is derived from imaging techniques. The GPS position can always be seen in the footage. The center of the GPS can be easily calculated by clicking on the pixel of the footage only. In this way, we can calculate not only the coordinates of GPS but also parameter like distance (offset) between the camera center .Some of the GPS device which we have used with our MMS system are Hemispehere, Leica , Garmin, Novatel SPAN CPT ( GPS +INS ), Applanix ( GPS +IMU ), etc. In short, user can choose GPS device as per the positional accuracy requirement.
Presentation video of MMS
Surveying and Measurement
Since MMS has two cameras, relative measurement is possible even in the areas with no GPS data or signals e.g. in urban area or tunnels. This is because the distance between two cameras is fixed and known scale helps to perform relative measurements. User can measure every point which can be see in the images with ease and precision. Just click the point you want to measure in one image, and the system will track the same point in neighboring images to give the resulting 3D coordinates automatically. Measure in epipolar mode for highest precision: clicking a point from one image and then click the same point from different image will give you precise 3D coordinates.

Epipolar Measurement
With Iwane technology, less field supplementary survey is required. The frame rate per second and angle of views also ensures that every object is seen from different angles and in many subsequent images. Therefore it is very little that one can miss!
Georeferencing
We use three ways to georeference our MMS data.
(a) Direct Georeferencing: The Smoothed, Best Estimated Trajectory” (SBET) derived after post processing of GPS + INS data is used as an ideal trajectory .
(b) In-direct Georeferencing: In some cases , we cannot rely on SBET and therefore we use manual surveyed ground control points at certain interval distance on the same or opposite side of the road and georeference images/video's.
(c ) Combination of SBET and GCP’s.
On some sections of the route which are usually open sky we receiev a good SBET and some places in urban areas we lack the accurasy , therefore we use a mizture of SBET and GCP's to ensure accuracy at every place on the route.
 Import GPS data and georeference Images
Import GPS data and georeference Images
After registering ground control points (GCP) to the sequences of images and using an advanced bundle adjustment, both the 3D surrounding and the system positions and orientations are known in the coordinate system of the GCPs. The accuracy of the geo referencing is such that we can easily identify outliers in the GCP dataset, thus enhancing the final result.
Import GCP's data and georeference Images
Users and Application
Iwane MMS is used to populate GIS database Development, Asset Management, Simulation and Mission Planning, Survey and Analysis, Situational Awareness, Virtual Tourism, Property Display, Tracking and Navigation, and other tasks that cannot be conveniently accomplished without out-of-the-box any GIS Software.
A few of the government department using Iwane MMS are Public works / Municipalities, Cadastral & Mapping Bureau, Land Management, Infrastructure, Housing, Development Ministry of Transportation, Planning Departments, Defense Sector, Housing Authorities, Disaster, Prevention and Mitigation.
Iwane MMS provide a platform to create 3D GIS and that can be used for many purposed like smart cities, e-governance, etc.
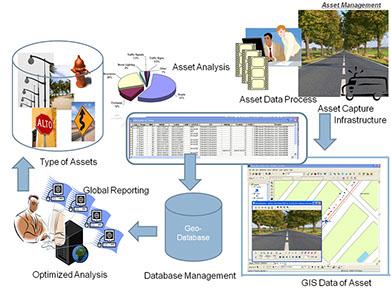 Map , Measure and Maintain Assets
Map , Measure and Maintain Assets
API's and SDK
Iwane MMS application software’s include desktop ALV2.0 , ALV for ArcGIS , Orthphoto and Web ALPF3.1. Standard SDK and API’s are available to interface with other GIS engines and web mapping services. Since we have developed everything from scratch, therefore we also provides services for customization and / or on the top development.
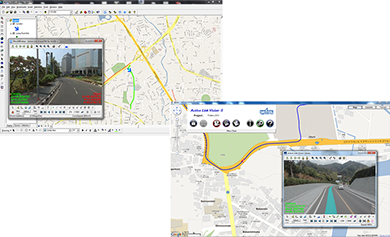 ALV(s)/ALV2.0 MMS Application Software
ALV(s)/ALV2.0 MMS Application Software
Using Iwane CV Technology, one can navigate inside the sequence of images without the help of any map .We are also working on automatic drive using the same principles.
“Iwane’s sophisticated mapping techniques deliver significant improvements in employee efficiency and expense reduction, and can be applied to wide variety applications.

Nation-wide Mapping
Single/Dual Camera MMS are proven systems and being used in more than 10 countries. Our MMS been awarded many international tenders and mapped nationwide coverage in Hong Kong , Thailand , Japan , KSA , etc..Above picture depicts the complete nation wide mapping and ensure full coverage.
SINGLE CAM SYSTEM (IMS2+)
Single camera system is available for sales with all the similar application software’s. For more details, please contact us for more details..

Dual
Single Camera System (IMS2+)
Single camera system comprises of 30M Pixel camera , gps , imu , accelerometer , daat acquistion pc & software , and with application software’s for desktop and web. To browse the 30M Pixel image online , please click on the link
https://sns.iwanelab.com/mercury/webalp3.1/demo/cv201704.html
Features
High resolution Imagery with 30 Megapixel Footage
Capture @ 15 FPS at Max.
Optimal speed of data capturing : 50-60 Km/h
Advanced MMS Application Software
High Positional and Relative (measurement) Accuracy
Components :
Hardware
Ladybug 5+ camera ( One ) – 30 M Pixel
GPS ( 1 PPS , mainly used for time synchronization )
High Accurate GPS +IMU (Optional )
Accelerometer
Shooting PC ( Data Acquisition PC )
Inverter for power from car battery
Accessories , cable and HDD
Software
Globe Capture (Data Acquisition Software)
MMS Application
-ALV (s) / ALV2.0
-ALV for ArcGIS ( plug –in for ArcGIS )
-MMS Server Web ALP3.1 ( html5 Support )
-highly programmable API’s
- AI based tools to extract features ( Services only )
- Orthophoto Generation ( Services only )
Others
API’s and SDK
Onsite Training
Annual Maintenance & Technical Support
Training and Maintenance & Support
We provide complete professional training to our clients either at our Head Quarters in Japan or at client side which includes straight from IMS3 equipment mounting on MMS vehicle, all calibrations (include between camera to camera, camera with accelerometer & camera to GPS ) , data acquisition, data processing and extraction of information using MMS application software ( ALV (s) / ALV for ArcGIS ). After the completion of training, we continuously support our clients by remote access, phone call or use other ways of communication.
Orthophoto of Road
Iwane solution also provide a flexibility of creating high resolution Orthophoto of the road surface from top/down camera geospatial imagery. Down camera imagery plays an important role because it is close from the road surface and can extract the ortho image mostly free from any noise like objects or obstacle.Orthophoto output is in geotiff and can be browsed in any of the GIS software’s to populate the inventory on the pavement or find out the road defects.
Orthophoto of road surface
Artificial Intelligence applied to MMS Data
Detection of features /objects in Mobile Mapping System Data ( Geo-images/video) using Artificial Intelligence . Detection of features/objects in images/video using artificial intelligence is very common but detecting the same object in consecutive frames and find out the precise coordinates of the object is something very unique! Using camera vector technology Iwane laboratories, ltd. is able to extract the coordinates (location) precisely (within 10 cm). Features like Lamp post, Street light, Manhole, Traffic signs, Traffic light ,etc..can be recognize & extract with a high precision.

AI/ML applied to MMS data
The GIS data is extracted to an accuracy where it can be directly injected to high accurate base maps after automatic extraction. As a result , all the features besides the road can be verified, edited, add missing or populate new one using AI. Road features like Street light, Lamp post, Manhole, Traffic signs, Traffic light, Pole , Billboard ,Catch basin , etc.. can be recognize & extract with a high precision.