Camera Vector (CV) Calculation
CV TECHNOLOGY
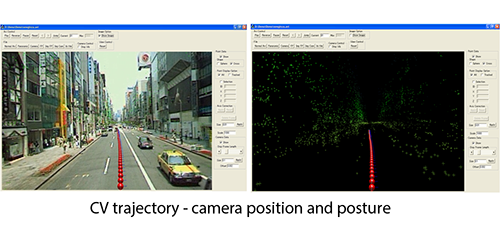
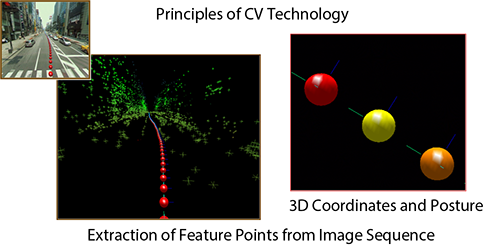
Iwane has been developing and refining technology to exploit vision science Camera Vector (CV) principles since 1979. Iwane camera tracking capabilities make it possible to derive camera position and posture only from the information contained in a moving image sequences alone. In short, it calculates the trajectory of the originating camera in 3D space and describes the position of features within the source image sequence.
3D geometry points can be created from identified features in the image sequence and using these points, their feature positions and the calibrated camera parameters, the camera path and point positions can be optimized to produce the most accurate recreation of the source camera.
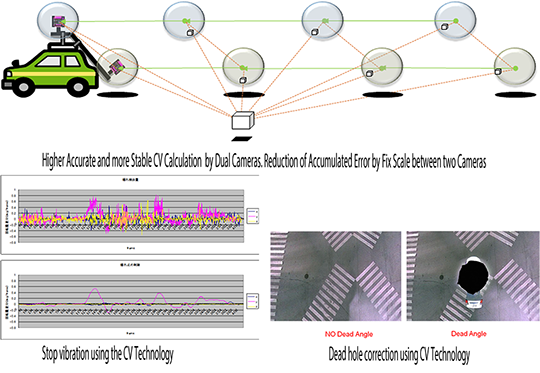
Our MMS system is based on Camera Vector (CV) technology and consists of two cameras. In dual camera MMS, the other camera is fixed at over 1m away from the second camera, both are synchronized and shooting is performed simultaneously. In other words, we can also say that one single frame of image that fit the image of two cameras. We have synchronized the two camera system in this system and can also evaluate results even the two camera systems are not synchronized using the CV integration technique.
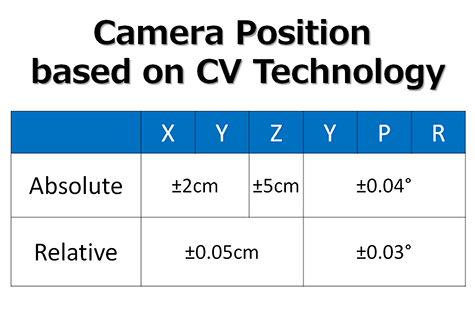
In the general, camera system is required to capture video image and conventional CV is used to determine the relative position and posture of the camera.
In the traditional CV operations, the relative value of the camera position calculated or derived and the scale is relative. The relative scale can be given an absolute scale by calibrating it with the actual coordinates ( GPS ) and therefore get the absolute scale all over the image. The measured values ( GCP’s ) are also used sometimes for calibration and these results in the change of scale and hence cause some errors which are inevitable.
In the Dual systems, there is a fix distance between the camera which is known and this phenomenon always helps to provide an absolute scale continuously. Hence, it has a nice feature to avoid any error in the scale.
By using a large set of hundreds or thousands of automatically identified feature tracks and application of statistical approaches to identify the primary motion within a sequence and discard tracks who's motion is inconsistent, Iwane’s camera tracking capabilities offer an unparalleled robustness against conflicting motions and fragmented tracks within a scene.
All six degree of freedom ( x,y,z, r,p,y) are calculated by analyzing sequence of images by using software only and therefore no need to use IMU to compliment trajectory in case of GPS outage. The CV parameter’s helps in keeping the GPS trajectory stable to certain distance.
The feature points are detected with sub-pixel accuracy using an edge, corner, contrast and other parameter detector. The points can be matched from one image to the next by choosing matches which have the highest cross-correlation of image intensity for regions surrounding the points.
Due to misalignments or moving object in the scene some of the correspondences may be incorrect. To achieve a robust matching, a random sampling algorithm is employed to detect bad correspondences. The camera parameters are estimated in an incremental fashion by using optimization technique applied to the good correspondences. It should be noted that the feature point identification is also intensity, color based and so the structure from motion approach is equally applicable to color, monochrome and thermal imagery and at any resolution.
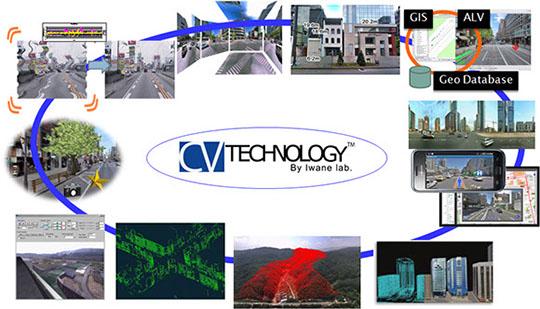
Iwane's camera tracking capability relies on algorithms developed in house which is related with the field of computer vision and in particular the technique known as Camera Vector (CV) technology, which underlies a many of Iwane products and is one of the key components in various Iwane capabilities. This generation of 3D structure from 2D source imagery is the key feature of Iwane Technology.
White Paper
document
PRM + CV
Parts Reconstruction Method (PRM) is a system developed by Iwane a decade before which find specific everyday objects in image and completely recognize object even if it’s partially visual in the scene. In this, the system needs to be trained to look for specific objects so as to match with the objects in the database. The software we develop combines multiple approaches to the challenges of Object Recognition such as algorithms from image processing, pattern recognition, computer vision and machine learning.
Iwane’s Camera Vector (CV) technology can calculate camera trajectory (position & posture) of the originating camera in 3D space by analyzing features points in a moving image sequences alone and also describe 3D position of features within the source image sequence. This CV trajectory is fused with GPS trajectory to make the sequence of images geo referenced. By applying PRM on the top or with CV, we not only recognize object in the scene/ sequence of scenes but also object characteristics like quantity, geo location, measurement, state and nature of object, etc.
Some of the key features of PRM + CV are:
■ Recognize objects and quantify their characteristics.
■ Find and identify objects in an image or video sequence.
■ Identify an object from a snapshot using database of relevant photos.
■ Identify the state of a standardized object.
■ Automatically identify key points in an object and take measurements.
■ Identify and track objects in videos for counting and measurement.
■ Automatically identify and track multiple moving parts.
■ Car navigation without GPS based on machine map (3D imagery) only.
Advanced Technology
Machine Map for Real-time Image Positioning
"Machine Map" is a 3D vector map of all surrounding and mainly for computerized machines. This Machine Map can be automatically created by 3D analysis and extraction of lines from original Omni-directional image. The high accurate calculation of the position & posture of camera/ object which cannot be achieved by using Global Positioning System can be achieved by comparing the real-time image with the Machine Map.
In addition, the objects and information in the Machine map can be overlaid in the real-time image at high-accurate position (e.g. Augmented reality, Image based Car Navigation)
[Technology] 3D Analysis of the moving vehicle from the other vehicle
3D analysis of the movement of a vehicle from another moving vehicle is possible by Iwane’s CV technology.
Title 1: 3D Analysis of moving vehicles
3D Analysis of Moving vehicles are possible by Iwane’s CV Technology. This is an essential technology for automatic driving.
Parts Reconstruction Method in Card Recognition
This is a demonstration of Card Recognition System created by Iwane Laboratories, Ltd. showing an application of PRM technology.
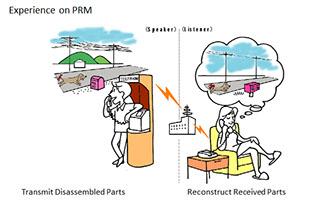
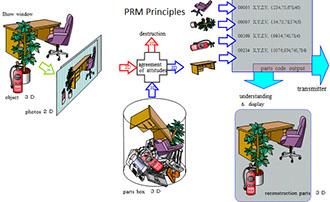
PRM stands for "Parts Reconstruction Method" and is completely new mechanism of Image recognition, conversion and display. PRM recognizes an image as a collection of the constituent elements and separate them into each part. In this method each part in the sender's database is selected and its code like unique id, name and alignment are sent to the receiver as code. The receivers select the matched part using the code in the receiver's database and re-align in three (3) dimensional space to represent it from arbitrary point of view. The parts database is always prepared for both the sender and receiver in PRM system and various relevant types of the parts are prepared as 3DCG.
In the above demonstration movie, initially the card of trump is captured by 3D camera and recognized in different parts by PRM. Then the each part is converted to part ID in database along with alignment details in space. These parts details are then sent from server to client side using the client server architecture. The information is reconstructed in 3D space, based on the parts in the client side PC's database. User can freely change the field of view and play Black Jack Game.